Vehicle detection and analysis of the traffic flow is important part of intelligent transportation systems. Depending on weather conditions there are various sensors and techniques used for vehicle detection. There is no universal sensor with excellent performance in all weather and road surface condition. To get better vehicle detection in all weather condition one of solution is to use several sensors at the same time. In this case some of the sensors give better result in rain or fog, some sensors shows better performance in summer season but in cold weather performance is poor. Collecting information about traffic flow form several sensors with several physical features gives bigger precision of vehicle detection in different weather conditions.
 Microphone array
Microphone array
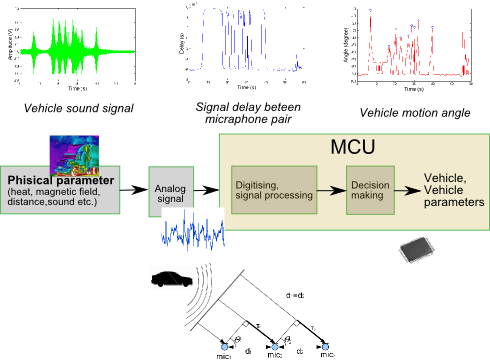
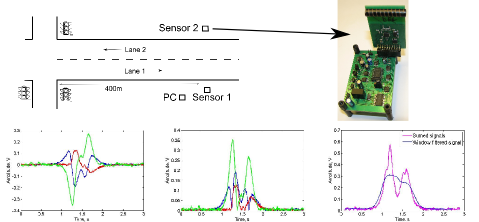
Applying microphone array and using signal processing it is possible to detect vehicle by it emitted sound. Most of noises coming from moving vehicles are noises from tires, noises generated by vehicle aerodynamics and noises generated by vehicle engines. Calculating sound signal delays between equidistantly spaced microphones allows to detect vehicle presence and motion direction. There is difference between the emitted sound from the heavy and light vehicles. This can be used to classify vehicles using sound signature. Using microphone array or only single microphone, is possible to detect emergency vehicle.
PIR sensors
Using Passive Infrared Sensors (PIR) is possible to detect moving vehicles. PIR sensor perceives an thermal radiation that is emitted from the object. In our application sensors does´t give information about classification, they are used only to detect presence of the vehicles. Vehicle detection algorithm is implemented into the micro controller, all information about the traffic flow are sent using wireless data communication.
is case it is vehicle. This means – vehicle detection is carried out indirectly. Using magnetic field sensors it is possible to detect and classify vehicles by it’s magnetic signature. Magnetic sensor can be placed on the road surface, embedded in pavement (invasive solution) or placed on the side of the rod (non-invasive solution). Our approach – sensors are placed on the both sides of the road opposite to each other. Using this arrangement is possible to distinguish heavy and light vehicles.
Magnetic sensors
Vehicle radiates small magnetic field. The main source of magnetic field is alternator and other electrical devices. Magnetic sensor do not detect vehicle emitted magnetic field, it detects Earth´s magnetic field´s local distortions caused by metal object – in th
Laser sensors
These sensors belong to active sensor group. Laser sensor emits light and receive some portion of reflected light. Sensors are placed above the road – for each traffic lane one sensor. By measuring distance to the moving object(vehicle) that is located under the light beam of the laser sensor its possible to detect vehicles and also classify vehicles(light vehicle, SUV, minivan, heavy vehicle). The classification is based on measured height of the vehicle.