Traffic monitoring system can potentially consist of many separate traffic nodes, each working with many sensor inputs and maybe even several actuation outputs. Such a system should work robustly over a network of many physical devices and maintain maximum functionality and security even when several of those physical devices fail or develop problems. At the same time such system must be easily extendable.
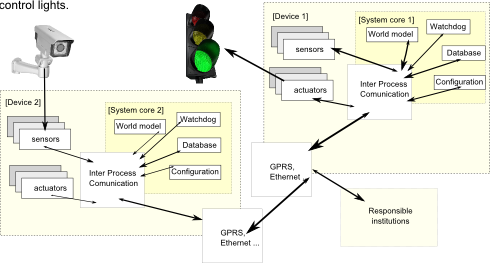
System consists of several physical computers. On each of these computes a special process called system core is running. This process provides infrastructure to all other system processes in such a way, that the physical complexity of the system is obscured. Because of this, all processes, such as vehicle detector or number plate detector can communicate to each other and use system data storage and communication facilities as if all of the system was located on the same physical machine. Additionally system core provides distributed configuration services, data storage services and security and recovery mechanisms, such as watchdog.
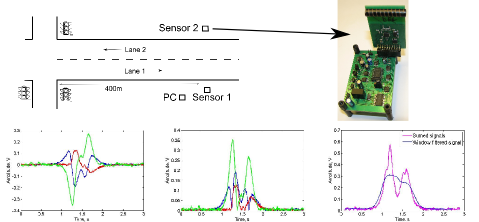
Every system task, except the internal communication done by system core, is done by separate modules. Some modules gather data from sensors, some process this data, and even others act on the data processing results by either notifying someone or actuating traffic control lights.
Each of the modules can subscribe to information channels provided by system core. Communication is also provided to the outside world for such cases when some institutions must be notified of the situtaion (for example in cases of emergencies).
All gathered information from all system nodes is gathered together and used to build the best possible traffic model. This traffic model is then used as a base to intepret situation on the road and act on it if necesary.
* This system architecture has been described in more detail in the following publication:
Nesenbergs, K.; Selavo, L., “A distributed data processing architecture for real time intelligent transport systems,” Informatics and Applications (ICIA),2013 Second International Conference on , vol., no., pp.155,160, 23-25 Sept. 2013
 The last seminar of MITS project has successfully ended. In addition to thorough presentations by our team, visitors were able to see and try out demonstrations, such as car detection in video and by magnetic sensors and microphone arrays using a remote control toy car. Of course recordings of tests with real cars were also provided but the seminar hall was too small for life size actual demonstration.
The last seminar of MITS project has successfully ended. In addition to thorough presentations by our team, visitors were able to see and try out demonstrations, such as car detection in video and by magnetic sensors and microphone arrays using a remote control toy car. Of course recordings of tests with real cars were also provided but the seminar hall was too small for life size actual demonstration.

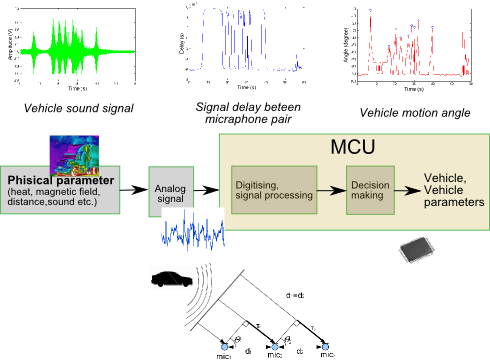 Microphone array
Microphone array